自动化的立体仓库系统要如何运行控制,伸缩货叉
发布日期:2019-08-12 浏览次数:702
仓库工作的zui优操控旨在给定的牢靠性条件下力求抵达高消费率和经济效益。伸缩货叉,一般自动化立体仓库的特性是转移机械化、操控主动化、办理微机化和信息网络化。跟着现代操控技能和计算机技能的不时展开,立体仓库将向着操控zui优化、工作智能化方向展开。自动化立体仓库体系工作的优化操控,提出仓库巷道堆垛机及出入库体系货箱工作的优化操控程序。
自动化立体仓库体系操控优化:自动化立体仓库的工作体系是使用计算机技能和自动化操控技能对仓库停止主动存储和取出货品,首要组成如下:
(1)立体多层式货架,用于存放货品单元。
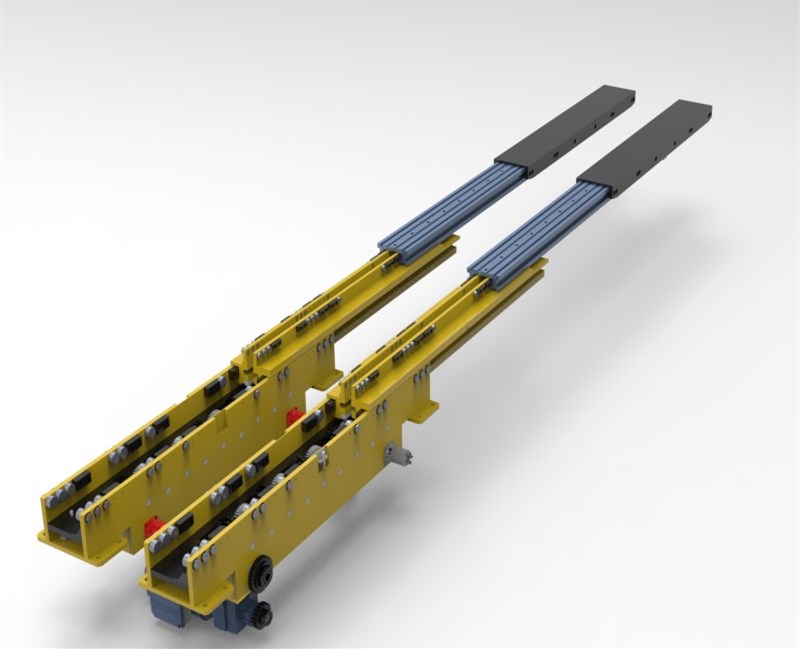
(2)巷道堆垛机,从货架巷道的任何货位上主动存入和取出货品。
(3)出入库保送体系,用于联合货架巷道口和出入库口的货品保送及转运设备。
(4)AGV或其它空中转移车辆,用于联合出入库口和仓库外部保送车辆(或主动保送线)的货品转移和装卸。
(5)办理操控中心,其中包括整个仓库的信息、数据处置办理计算机、监控终端、货品外形及分量检测闪现、条形码阅读设备和有关首要电气操控操作台等。
工作操控的优化准则完结仓库工作的优化操控,首要需必定仓库工作作业的优化准则。在挑选优化判据时,一般要操控以下两个处置方法:
①针对每一个优化使命按其特性和内容挑选能提出价值目标或实物目标的特别判据,用这种方法拟定的优化操控造业方案,可归纳多个判据使命,这些使命互相有信息,按必定次序加以处理,并与仓库的储运作业进程停顿相和谐。
②针对成组使命以及与有关使命相对应且在功用上相似的操控参数,然后挑选归纳的约束条件和归纳整体意图函数。
除此以外,在实践设计时,还需求根据具体情况恰当挑选。自动化立体仓库的工作情况受许多要素影响,在优化必定仓库体系主动化办理及操控方案时,需归纳各子体系及其上、中、下级操控体系的互相作用,处理相邻各级之间以及内部各局部之间存在的不和谐情况,从约束各级使其和谐分歧的概念动身,必定仓库抵达优化工作情况时的几个首要目标。经过分析必定各级子体系之间的功用关系和信息,建立数学模型或优化操控模型,对有关模型停止分析、求解,然后必定zui优化操控方案,给编制计算机操控程序也提供了理论根据。
伸缩货叉,仓库操控体系的数学模型建立数学模型的前提条件及假定:
(1)操控进程按时刻距离(t 0,T)范围界说。
(2)在必定的时刻距离内,充沛使用现有的起重运输设备。
(3)各种设备的总功率足以承担方案规则的作业量。
(4)货品种类数有必定的极限,使命单排队体系使命缓冲区容量有限。
(5)各种运输车辆数有必定极限。